Cada comando tiene una cantidad de pulsos en específico. Por ejemplo, el comando para subir el volumen pudiera ser, digamos, de 20 pulsos, mientras que el comando para bajar el volumen pudiera ser, tal vez, de 22 pulsos. Y así, dependiendo de la cantidad de pulsos que se recibieron, es el botón que se presionó en el control remoto, y es por lo tanto el comando que se debe de ejecutar.

Con los robots ocurre exactamente lo mismo, solo que aquí los comandos no significan subir o bajar el volumen, sino que en el programa se le pude poner que el robot haga cualquier cosa que se requiera.
Al igual que ocurre con la televisión, es necesario que la luz infrarroja, cuando viaja, tenga el camino libre para llegar hasta el sensor. De no ser así, el comando nunca podrá llegar a su destino.
A continuación se muestra como se utiliza el control remoto con el sensor de infrarrojos para el robot Lego MindStorms EV3.
Nota. Al control remoto del robot Lego MindStorms EV3 también se le llama "baliza".
Lego MindStorms EV3.
El sensor de infrarrojos comúnmente se usa con el comando "Esperar", con el cual el robot continuará realizando cualquier cosa que esté haciendo hasta que el sensor de infrarrojos realice la detección esperada. También se puede usar con las instrucciones de control "Bucle" e "Interruptor".

Se puede usar de dos formas: una es para detectar cuando se presionó un botón del control remoto (o baliza). La otra forma es para detectar la distancia de la baliza al sensor, o su orientación. Cabe aclarar que no son distancias absolutas, sino que son números del 0 al 100. Un valor alto significa que la baliza está lejos del sensor infrarrojo, y un valor bajo significa que está cerca.
Cuando se usa para detectar la orientación se tendrán valores desde -25 hasta 25. El cero significa que la baliza se encuentra viendo de frente al sensor.
Ejemplos
Lego MindStorms EV3. Aquí, el robot estará esperando a que se presione un botón del control remoto. Cada vez que se presione el primer botón, avanzará 1 segundo.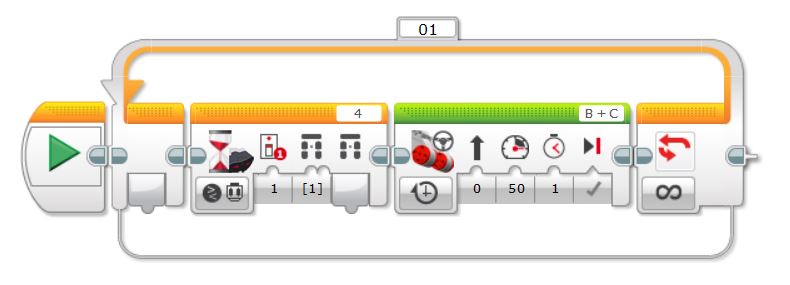
Lego MindStorms EV3. Aquí, el robot estará girando hasta quedar de frente a la baliza. Cuando esto pase, se detendrá.


Enlaces
anterior siguiente